earlier than we dive in:
- I’m a developer at Google Cloud. Ideas and opinions expressed right here are completely my very own.
- The entire supply code for this text, together with future updates, is on the market in this pocket book below the Apache 2.0 license.
- All new photographs on this article had been generated with Gemini Nano Banana utilizing the proof-of-concept technology pipeline explored right here.
- You’ll be able to experiment with Gemini totally free in Google AI Studio. Please be aware that programmatic API entry to Nano Banana is a pay-as-you-go service.
🔥 Problem
All of us have present photographs value reusing in several contexts. This may typically indicate modifying the photographs, a posh (if not unimaginable) job requiring very particular expertise and instruments. This explains why our archives are stuffed with forgotten or unused treasures. State-of-the-art imaginative and prescient fashions have advanced a lot that we are able to rethink this drawback.
So, can we breathe new life into our visible archives?
Let’s attempt to full this problem with the next steps:
- 1️⃣ Begin from an archive picture we’d prefer to reuse
- 2️⃣ Extract a personality to create a brand-new reference picture
- 3️⃣ Generate a collection of photographs for example the character’s journey, utilizing solely prompts and the brand new property
For this, we’ll discover the capabilities of “Gemini 2.5 Flash Picture”, often known as “Nano Banana” 🍌.
🏁 Setup
🐍 Python packages
We’ll use the next packages:
google-genai: The Google Gen AI Python SDK lets us name Gemini with just a few traces of codenetworkxfor graph administration
We’ll additionally use the next dependencies:
pillowandmatplotlibfor information visualizationtenacityfor request administration
%pip set up --quiet "google-genai>=1.38.0" "networkx[default]"🤖 Gen AI SDK
Create a google.genai shopper:
from google import genai
check_environment()
shopper = genai.Consumer()Test your configuration:
check_configuration(shopper)Utilizing the Vertex AI API with challenge "…" in location "international"🧠 Gemini mannequin
For this problem, we’ll choose the newest Gemini 2.5 Flash Picture mannequin (at present in preview):
GEMINI_2_5_FLASH_IMAGE = "gemini-2.5-flash-image-preview"
💡 “Gemini 2.5 Flash Picture” is often known as “Nano Banana” 🍌
🛠️ Helpers
Outline some helper capabilities to generate and show photographs: 🔽
import IPython.show
import tenacity
from google.genai.errors import ClientError
from google.genai.varieties import GenerateContentConfig, PIL_Image
GEMINI_2_5_FLASH_IMAGE = "gemini-2.5-flash-image-preview"
GENERATION_CONFIG = GenerateContentConfig(response_modalities=["TEXT", "IMAGE"])
def generate_content(sources: checklist[PIL_Image], immediate: str) -> PIL_Image | None:
immediate = immediate.strip()
contents = [*sources, prompt] if sources else immediate
response = None
for try in get_retrier():
with try:
response = shopper.fashions.generate_content(
mannequin=GEMINI_2_5_FLASH_IMAGE,
contents=contents,
config=GENERATION_CONFIG,
)
if not response or not response.candidates:
return None
if not (content material := response.candidates[0].content material):
return None
if not (components := content material.components):
return None
picture: PIL_Image | None = None
for half in components:
if half.textual content:
display_markdown(half.textual content)
proceed
assert (sdk_image := half.as_image())
assert (picture := sdk_image._pil_image)
display_image(picture)
return picture
def get_retrier() -> tenacity.Retrying:
return tenacity.Retrying(
cease=tenacity.stop_after_attempt(7),
wait=tenacity.wait_incrementing(begin=10, increment=1),
retry=should_retry_request,
reraise=True,
)
def should_retry_request(retry_state: tenacity.RetryCallState) -> bool:
if not retry_state.final result:
return False
err = retry_state.final result.exception()
if not isinstance(err, ClientError):
return False
print(f"❌ ClientError {err.code}: {err.message}")
retry = False
match err.code:
case 400 if err.message isn't None and " strive once more " in err.message:
# Workshop: Cloud Storage accessed for the primary time (service agent provisioning)
retry = True
case 429:
# Workshop: short-term challenge with 1 QPM quota
retry = True
print(f"🔄 Retry: {retry}")
return retry
def display_markdown(markdown: str) -> None:
IPython.show.show(IPython.show.Markdown(markdown))
def display_image(picture: PIL_Image) -> None:
IPython.show.show(picture)🖼️ Property
Let’s outline the property for our character’s journey and the capabilities to handle them:
import enum
from collections.abc import Sequence
from dataclasses import dataclass
class AssetId(enum.StrEnum):
ARCHIVE = "0_archive"
ROBOT = "1_robot"
MOUNTAINS = "2_mountains"
VALLEY = "3_valley"
FOREST = "4_forest"
CLEARING = "5_clearing"
ASCENSION = "6_ascension"
SUMMIT = "7_summit"
BRIDGE = "8_bridge"
HAMMOCK = "9_hammock"
@dataclass
class Asset:
id: str
source_ids: Sequence[str]
immediate: str
pil_image: PIL_Image
class Property(dict[str, Asset]):
def set_asset(self, asset: Asset) -> None:
# Observe: This replaces any present asset (if wanted, add guardrails to auto-save|preserve all variations)
self[asset.id] = asset
def generate_image(source_ids: Sequence[str], immediate: str, new_id: str = "") -> None:
sources = [assets[source_id].pil_image for source_id in source_ids]
immediate = immediate.strip()
picture = generate_content(sources, immediate)
if picture and new_id:
property.set_asset(Asset(new_id, source_ids, immediate, picture))
property = Property()📦 Reference archive
We are able to now fetch our reference archive and make it our first asset: 🔽
import urllib.request
import PIL.Picture
import PIL.ImageOps
ARCHIVE_URL = "https://storage.googleapis.com/github-repo/generative-ai/gemini/use-cases/media-generation/consistent_imagery_generation/0_archive.png"
def load_archive() -> None:
picture = get_image_from_url(ARCHIVE_URL)
# Hold unique particulars in 16:9 panorama facet ratio (arbitrary)
picture = crop_expand_if_needed(picture, 1344, 768)
property.set_asset(Asset(AssetId.ARCHIVE, [], "", picture))
display_image(picture)
def get_image_from_url(image_url: str) -> PIL_Image:
with urllib.request.urlopen(image_url) as response:
return PIL.Picture.open(response)
def crop_expand_if_needed(picture: PIL_Image, dst_w: int, dst_h: int) -> PIL_Image:
src_w, src_h = picture.measurement
if dst_w < src_w or dst_h < src_h:
crop_l, crop_t = (src_w - dst_w) // 2, (src_h - dst_h) // 2
picture = picture.crop((crop_l, crop_t, crop_l + dst_w, crop_t + dst_h))
src_w, src_h = picture.measurement
if src_w < dst_w or src_h < dst_h:
off_l, off_t = (dst_w - src_w) // 2, (dst_h - src_h) // 2
borders = (off_l, off_t, dst_w - src_w - off_l, dst_h - src_h - off_t)
picture = PIL.ImageOps.develop(picture, borders, fill="white")
assert picture.measurement == (dst_w, dst_h)
return pictureload_archive()
💡 Gemini will protect the closest facet ratio of the final enter picture. Consequently, we cropped the archive picture to
1344 × 768pixels (near16:9) to protect the unique particulars (no rescaling) and preserve the identical panorama decision in all our future scenes. Gemini can generate1024 × 1024photographs (1:1) but additionally their16:9,9:16,4:3, and3:4equivalents (when it comes to tokens).
This archive picture was generated in July 2024 with a beta model of Imagen 3, prompted with “On white background, a small hand-felted toy of blue robotic. The felt is mushy and cuddly…”. The end result regarded actually good however, on the time, there was completely no determinism and no consistency. In consequence, this was a pleasant one-shot picture technology and the lovable little robotic appeared gone ceaselessly…
Let’s attempt to extract our little robotic:
source_ids = [AssetId.ARCHIVE]
immediate = "Extract the robotic as is, with out its shadow, changing every part with a strong white fill."
generate_image(source_ids, immediate)
⚠️ The robotic is completely extracted, however that is primarily a very good background elimination, which many fashions can carry out. This immediate makes use of phrases from graphics software program, whereas we are able to now motive when it comes to picture composition. It’s additionally not essentially a good suggestion to attempt to use conventional binary masks, as object edges and shadows convey important particulars about shapes, textures, positions, and lighting.
Let’s return to our archive to carry out a sophisticated extraction as an alternative, and instantly generate a personality sheet…
🪄 Character sheet
Gemini has spatial understanding, so it’s capable of present completely different views whereas preserving visible options. Let’s generate a entrance/again character sheet and, as our little robotic will go on a journey, additionally add a backpack on the similar time:
source_ids = [AssetId.ARCHIVE]
immediate = """
- Scene: Robotic character sheet.
- Left: Entrance view of the extracted robotic.
- Proper: Again view of the extracted robotic (seamless again).
- The robotic wears a similar small, brown-felt backpack, with a tiny polished-brass buckle and easy straps in each views. The backpack straps are seen in each views.
- Background: Pure white.
- Textual content: On the highest, caption the picture "ROBOT CHARACTER SHEET" and, on the underside, caption the views "FRONT VIEW" and "BACK VIEW".
"""
new_id = AssetId.ROBOT
generate_image(source_ids, immediate, new_id)
💡 Just a few remarks:
- The immediate describes the scene when it comes to composition, as generally utilized in media studios.
- If we strive successive generations, they’re constant, with all robotic options preserved.
- Our immediate does element some elements of the backpack, however we’ll get barely completely different backpacks for every part that’s unspecified.
- For the sake of simplicity, we added the backpack instantly within the character sheet however, in an actual manufacturing pipeline, we’d in all probability make it a part of a separate accent sheet.
- To manage precisely the backpack form and design, we may additionally use a reference picture and “remodel the backpack right into a stylized felt model”.
This new asset can now function a design reference in our future picture generations.
✨ First scene
Let’s get began with a mountain surroundings:
source_ids = [AssetId.ROBOT]
immediate = """
- Picture 1: Robotic character sheet.
- Scene: Macro pictures of a superbly crafted miniature diorama.
- Background: Delicate-focus of a panoramic vary of interspersed, dome-like felt mountains, in varied shades of medium blue/inexperienced, with curvy white snowcaps, extending over the whole horizon.
- Foreground: Within the bottom-left, the robotic stands on the sting of a medium-gray felt cliff, considered from a 3/4 again angle, searching over a sea of clouds (product of white cotton).
- Lighting: Studio, clear and mushy.
"""
new_id = AssetId.MOUNTAINS
generate_image(source_ids, immediate, new_id)
💡 The mountain form is specified as “dome-like” so our character can stand on one of many summits in a while.
It’s vital to spend a while on this primary scene as, in a cascading impact, it is going to outline the general look of our story. Take a while to refine the immediate or strive a few instances to get the perfect variation.
Any longer, our technology inputs might be each the character sheet and a reference scene…
✨ Successive scenes
Let’s get the robotic down a valley:
source_ids = [AssetId.ROBOT, AssetId.MOUNTAINS]
immediate = """
- Picture 1: Robotic character sheet.
- Picture 2: Earlier scene.
- The robotic has descended from the cliff to a grey felt valley. It stands within the middle, seen instantly from the again. It's holding/studying a felt map with outstretched arms.
- Massive easy, spherical, felt rocks in varied beige/grey shades are seen on the edges.
- Background: The distant mountain vary. A skinny layer of clouds obscures its base and the tip of the valley.
- Lighting: Golden hour gentle, mushy and subtle.
"""
new_id = AssetId.VALLEY
generate_image(source_ids, immediate, new_id)
💡 Just a few notes:
- The offered specs about our enter photographs (
"Picture 1:…","Picture 2:…") are vital. With out them, “the robotic” may check with any of the three robots within the enter photographs (2 within the character sheet, 1 within the earlier scene). With them, we point out that it’s the identical robotic. In case of confusion, we might be extra particular with"the [entity] from picture [number]". - Alternatively, since we didn’t present a exact description of the valley, successive requests will give completely different, attention-grabbing, and artistic outcomes (we are able to choose our favourite or make the immediate extra exact for extra determinism).
- Right here, we additionally examined a distinct lighting, which considerably modifications the entire scene.
Then, we are able to transfer ahead into this scene:
source_ids = [AssetId.ROBOT, AssetId.VALLEY]
immediate = """
- Picture 1: Robotic character sheet.
- Picture 2: Earlier scene.
- The robotic goes on and faces a dense, infinite forest of straightforward, big, skinny bushes, that fills the whole background.
- The bushes are constructed from varied shades of sunshine/medium/darkish inexperienced felt.
- The robotic is on the correct, considered from a 3/4 rear angle, not holding the map, with each palms clasped to its ears in despair.
- On the left & proper backside sides, rocks (just like picture 2) are partially seen.
"""
new_id = AssetId.FOREST
generate_image(source_ids, immediate, new_id)
💡 Of curiosity:
- We may place the character, change its standpoint, and even “animate” its arms for extra expressivity.
- The “not holding the map” precision prevents the mannequin from making an attempt to maintain it from the earlier scene in a significant method (e.g., the robotic dropped the map on the ground).
- We didn’t present lighting particulars: The lighting supply, high quality, and course have been stored from the earlier scene.
Let’s undergo the forest:
source_ids = [AssetId.ROBOT, AssetId.FOREST]
immediate = """
- Picture 1: Robotic character sheet.
- Picture 2: Earlier scene.
- The robotic goes by means of the dense forest and emerges right into a clearing, pushing apart two tree trunks.
- The robotic is within the middle, now seen from the entrance view.
- The bottom is product of inexperienced felt, with flat patches of white felt snow. Rocks are not seen.
"""
new_id = AssetId.CLEARING
generate_image(source_ids, immediate, new_id)
💡 We modified the bottom however didn’t present further particulars for the view and the forest: The mannequin will typically protect a lot of the bushes.
Now that the valley-forest sequence is over, we are able to journey as much as the mountains, utilizing the unique mountain scene as our reference to return to that atmosphere:
source_ids = [AssetId.ROBOT, AssetId.MOUNTAINS]
immediate = """
- Picture 1: Robotic character sheet.
- Picture 2: Earlier scene.
- Shut-up of the robotic now climbing the height of a medium-green mountain and reaching its summit.
- The mountain is true within the middle, with the robotic on its left slope, considered from a 3/4 rear angle.
- The robotic has each ft on the mountain and is utilizing two felt ice axes (brown handles, grey heads), reaching the snowcap.
- Horizon: The distant mountain vary.
"""
new_id = AssetId.ASCENSION
generate_image(source_ids, immediate, new_id)
💡 The mountain close-up, inferred from the blurred background, is fairly spectacular.
Let’s climb to the summit:
source_ids = [AssetId.ROBOT, AssetId.ASCENSION]
immediate = """
- Picture 1: Robotic character sheet.
- Picture 2: Earlier scene.
- The robotic reaches the highest and stands on the summit, seen within the entrance view, in close-up.
- It's not holding the ice axes, that are planted upright within the snow on all sides.
- It has each arms raised in signal of victory.
"""
new_id = AssetId.SUMMIT
generate_image(source_ids, immediate, new_id)
💡 It is a logical follow-up but additionally a pleasant, completely different view.
Now, let’s strive one thing completely different to considerably recompose the scene:
source_ids = [AssetId.ROBOT, AssetId.SUMMIT]
immediate = """
- Picture 1: Robotic character sheet.
- Picture 2: Earlier scene.
- Take away the ice axes.
- Transfer the middle mountain to the left fringe of the picture and add a barely taller medium-blue mountain to the correct edge.
- Droop a stylized felt bridge between the 2 mountains: Its deck is product of thick felt planks in varied wooden shades.
- Place the robotic on the middle of the bridge with one arm pointing towards the blue mountain.
- View: Shut-up.
"""
new_id = AssetId.BRIDGE
generate_image(source_ids, immediate, new_id)
💡 Of curiosity:
- This crucial immediate composes the scene when it comes to actions. It’s generally simpler than descriptions.
- A brand new mountain is added as instructed, and it’s each completely different and constant.
- The bridge attaches to the summits in very believable methods and appears to obey the legal guidelines of physics.
- The “Take away the ice axes” instruction is right here for a motive. With out it, it’s as if we had been prompting “do no matter you’ll be able to with the ice axes from the earlier scene: go away them the place they’re, don’t let the robotic go away with out them, or the rest”, resulting in random outcomes.
- It’s additionally potential to get the robotic to stroll on the bridge, seen from the facet (which we by no means generated earlier than), but it surely’s laborious to have it constantly stroll from left to proper. Including left and proper views within the character sheet ought to repair this.
Let’s generate a closing scene and let the robotic get some well-deserved relaxation:
source_ids = [AssetId.ROBOT, AssetId.BRIDGE]
immediate = """
- Picture 1: Robotic character sheet.
- Picture 2: Earlier scene.
- The robotic is sleeping peacefully (each eyes turned into a "closed" state), in a cushty brown-and-tan tartan hammock that has changed the bridge.
"""
new_id = AssetId.HAMMOCK
generate_image(source_ids, immediate, new_id)
💡 Of curiosity:
- This time, the immediate is descriptive, and it really works in addition to the earlier crucial immediate.
- The bridge-hammock transformation is very nice and preserves the attachments on the mountain summits.
- The robotic transformation can also be spectacular, because it hasn’t been seen on this place earlier than.
- The closed eyes are essentially the most tough element to get constantly (could require a few makes an attempt), in all probability as a result of we’re accumulating many alternative transformations without delay (and diluting the mannequin’s consideration). For full management and extra deterministic outcomes, we are able to give attention to important modifications over iterative steps, or create varied character sheets upfront.
We’ve got illustrated our story with 9 new constant photographs! Let’s take a step again to know what we’ve constructed…
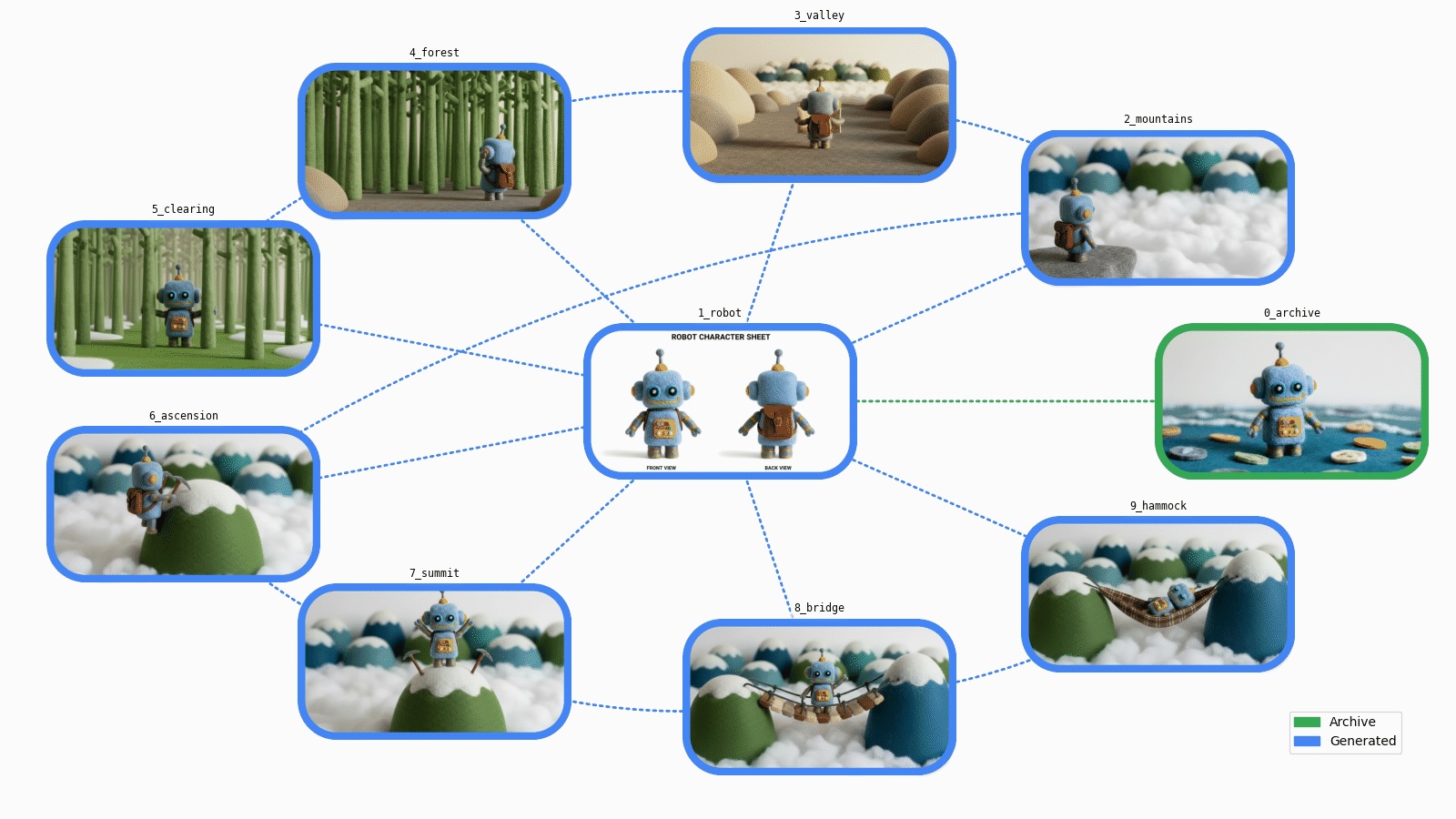
🗺️ Graph visualization
We now have a set of picture property, from archives to brand-new generated property.
Let’s add some information visualization to get a greater sense of the steps accomplished…
🔗 Directed graph
Our new property are all associated, related by a number of “generated from” hyperlinks. From an information construction standpoint, it is a directed graph.
We are able to construct the corresponding directed graph utilizing the networkx library:
import networkx as nx
def build_graph(property: Property) -> nx.DiGraph:
graph = nx.DiGraph(property=property)
# Nodes
for asset in property.values():
graph.add_node(asset.id, asset=asset)
# Edges
for asset in property.values():
for source_id in asset.source_ids:
graph.add_edge(source_id, asset.id)
return graph
asset_graph = build_graph(property)
print(asset_graph)DiGraph with 10 nodes and 16 edgesLet’s place essentially the most used asset within the middle and show the opposite property round: 🔽
import matplotlib.pyplot as plt
def display_basic_graph(graph: nx.Graph) -> None:
pos = compute_node_positions(graph)
coloration = "#4285F4"
choices = dict(
node_color=coloration,
edge_color=coloration,
arrowstyle="wedge",
with_labels=True,
font_size="small",
bbox=dict(ec="black", fc="white", alpha=0.7),
)
nx.draw(graph, pos, **choices)
plt.present()
def compute_node_positions(graph: nx.Graph) -> dict[str, tuple[float, float]]:
# Put essentially the most related node within the middle
center_node = most_connected_node(graph)
edge_nodes = set(graph) - {center_node}
pos = nx.circular_layout(graph.subgraph(edge_nodes))
pos[center_node] = (0.0, 0.0)
return pos
def most_connected_node(graph: nx.Graph) -> str:
if not graph.nodes():
return ""
centrality_by_id = nx.degree_centrality(graph)
return max(centrality_by_id, key=lambda s: centrality_by_id.get(s, 0.0))display_basic_graph(asset_graph)
That’s an accurate abstract of our completely different steps. It’d be good if we may additionally visualize our property…
🌟 Asset graph
Let’s add customized matplotlib capabilities to render the graph nodes with the property in a extra visually interesting method: 🔽
import typing
from collections.abc import Iterator
from io import BytesIO
from pathlib import Path
import PIL.Picture
import PIL.ImageDraw
from google.genai.varieties import PIL_Image
from matplotlib.axes import Axes
from matplotlib.backends.backend_agg import FigureCanvasAgg
from matplotlib.determine import Determine
from matplotlib.picture import AxesImage
from matplotlib.patches import Patch
from matplotlib.textual content import Annotation
from matplotlib.transforms import Bbox, TransformedBbox
@enum.distinctive
class ImageFormat(enum.StrEnum):
# Matches PIL.Picture.Picture.format
WEBP = enum.auto()
PNG = enum.auto()
GIF = enum.auto()
def yield_generation_graph_frames(
graph: nx.DiGraph,
animated: bool,
) -> Iterator[PIL_Image]:
def get_fig_ax() -> tuple[Figure, Axes]:
issue = 1.0
figsize = (16 * issue, 9 * issue)
fig, ax = plt.subplots(figsize=figsize)
fig.tight_layout(pad=3)
handles = [
Patch(color=COL_OLD, label="Archive"),
Patch(color=COL_NEW, label="Generated"),
]
ax.legend(handles=handles, loc="decrease proper")
ax.set_axis_off()
return fig, ax
def prepare_graph() -> None:
arrows = nx.draw_networkx_edges(graph, pos, ax=ax)
for arrow in arrows:
arrow.set_visible(False)
def get_box_size() -> tuple[float, float]:
xlim_l, xlim_r = ax.get_xlim()
ylim_t, ylim_b = ax.get_ylim()
issue = 0.08
box_w = (xlim_r - xlim_l) * issue
box_h = (ylim_b - ylim_t) * issue
return box_w, box_h
def add_axes() -> Axes:
xf, yf = tr_figure(pos[node])
xa, ya = tr_axes([xf, yf])
x_y_w_h = (xa - box_w / 2.0, ya - box_h / 2.0, box_w, box_h)
a = plt.axes(x_y_w_h)
a.set_title(
asset.id,
loc="middle",
backgroundcolor="#FFF8",
fontfamily="monospace",
fontsize="small",
)
a.set_axis_off()
return a
def draw_box(coloration: str, picture: bool) -> AxesImage:
if picture:
end result = pil_image.copy()
else:
end result = PIL.Picture.new("RGB", image_size, coloration="white")
xy = ((0, 0), image_size)
# Draw field define
draw = PIL.ImageDraw.Draw(end result)
draw.rounded_rectangle(xy, box_r, define=coloration, width=outline_w)
# Make every part outdoors the field define clear
masks = PIL.Picture.new("L", image_size, 0)
draw = PIL.ImageDraw.Draw(masks)
draw.rounded_rectangle(xy, box_r, fill=0xFF)
end result.putalpha(masks)
return a.imshow(end result)
def draw_prompt() -> Annotation:
textual content = f"Immediate:n{asset.immediate}"
margin = 2 * outline_w
image_w, image_h = image_size
bbox = Bbox([[0, margin], [image_w - margin, image_h - margin]])
clip_box = TransformedBbox(bbox, a.transData)
return a.annotate(
textual content,
xy=(0, 0),
xytext=(0.06, 0.5),
xycoords="axes fraction",
textcoords="axes fraction",
verticalalignment="middle",
fontfamily="monospace",
fontsize="small",
linespacing=1.3,
annotation_clip=True,
clip_box=clip_box,
)
def draw_edges() -> None:
STYLE_STRAIGHT = "arc3"
STYLE_CURVED = "arc3,rad=0.15"
for guardian in graph.predecessors(node):
edge = (guardian, node)
coloration = COL_NEW if property[parent].immediate else COL_OLD
type = STYLE_STRAIGHT if center_node in edge else STYLE_CURVED
nx.draw_networkx_edges(
graph,
pos,
[edge],
width=2,
edge_color=coloration,
type="dotted",
ax=ax,
connectionstyle=type,
)
def get_frame() -> PIL_Image:
canvas = typing.forged(FigureCanvasAgg, fig.canvas)
canvas.draw()
image_size = canvas.get_width_height()
image_bytes = canvas.buffer_rgba()
return PIL.Picture.frombytes("RGBA", image_size, image_bytes).convert("RGB")
COL_OLD = "#34A853"
COL_NEW = "#4285F4"
property = graph.graph["assets"]
center_node = most_connected_node(graph)
pos = compute_node_positions(graph)
fig, ax = get_fig_ax()
prepare_graph()
box_w, box_h = get_box_size()
tr_figure = ax.transData.remodel # Information → show coords
tr_axes = fig.transFigure.inverted().remodel # Show → determine coords
for node, information in graph.nodes(information=True):
if animated:
yield get_frame()
# Edges and sub-plot
asset = information["asset"]
pil_image = asset.pil_image
image_size = pil_image.measurement
box_r = min(image_size) * 25 / 100 # Radius for rounded rect
outline_w = min(image_size) * 5 // 100
draw_edges()
a = add_axes() # a is utilized in sub-functions
# Immediate
if animated and asset.immediate:
field = draw_box(COL_NEW, picture=False)
immediate = draw_prompt()
yield get_frame()
field.set_visible(False)
immediate.set_visible(False)
# Generated picture
coloration = COL_NEW if asset.immediate else COL_OLD
draw_box(coloration, picture=True)
plt.shut()
yield get_frame()
def draw_generation_graph(
graph: nx.DiGraph,
format: ImageFormat,
) -> BytesIO:
frames = checklist(yield_generation_graph_frames(graph, animated=False))
assert len(frames) == 1
body = frames[0]
params: dict[str, typing.Any] = dict()
match format:
case ImageFormat.WEBP:
params.replace(lossless=True)
image_io = BytesIO()
body.save(image_io, format, **params)
return image_io
def draw_generation_graph_animation(
graph: nx.DiGraph,
format: ImageFormat,
) -> BytesIO:
frames = checklist(yield_generation_graph_frames(graph, animated=True))
assert 1 <= len(frames)
if format == ImageFormat.GIF:
# Dither all frames with the identical palette to optimize the animation
# The animation is cumulative, so most colours are within the final body
methodology = PIL.Picture.Quantize.MEDIANCUT
palettized = frames[-1].quantize(methodology=methodology)
frames = [frame.quantize(method=method, palette=palettized) for frame in frames]
# The animation might be performed in a loop: begin biking with essentially the most full body
first_frame = frames[-1]
next_frames = frames[:-1]
INTRO_DURATION = 3000
FRAME_DURATION = 1000
durations = [INTRO_DURATION] + [FRAME_DURATION] * len(next_frames)
params: dict[str, typing.Any] = dict(
save_all=True,
append_images=next_frames,
length=durations,
loop=0,
)
match format:
case ImageFormat.GIF:
params.replace(optimize=False)
case ImageFormat.WEBP:
params.replace(lossless=True)
image_io = BytesIO()
first_frame.save(image_io, format, **params)
return image_io
def display_generation_graph(
graph: nx.DiGraph,
format: ImageFormat | None = None,
animated: bool = False,
save_image: bool = False,
) -> None:
if format is None:
format = ImageFormat.WEBP if running_in_colab_env else ImageFormat.PNG
if animated:
image_io = draw_generation_graph_animation(graph, format)
else:
image_io = draw_generation_graph(graph, format)
image_bytes = image_io.getvalue()
IPython.show.show(IPython.show.Picture(image_bytes))
if save_image:
stem = "graph_animated" if animated else "graph"
Path(f"./{stem}.{format.worth}").write_bytes(image_bytes)We are able to now show our technology graph:
display_generation_graph(asset_graph)
🚀 Problem accomplished
We managed to generate a full set of latest constant photographs with Nano Banana and realized just a few issues alongside the way in which:
- Photos show once more that they’re value a thousand phrases: It’s now quite a bit simpler to generate new photographs from present ones and easy directions.
- We are able to create or edit photographs simply when it comes to composition (letting us all turn into inventive administrators).
- We are able to use descriptive or crucial directions.
- The mannequin’s spatial understanding permits 3D manipulations.
- We are able to add textual content in our outputs (character sheet) and likewise check with textual content in our inputs (entrance/again views).
- Consistency might be preserved at very completely different ranges: character, scene, texture, lighting, digital camera angle/sort…
- The technology course of can nonetheless be iterative but it surely looks like 10x-100x quicker for reaching better-than-hoped-for outcomes.
- It’s now potential to breathe new life into our archives!
Attainable subsequent steps:
- The method we adopted is basically a technology pipeline. It may be industrialized for automation (e.g., altering a node regenerates its descendants) or for the technology of various variations in parallel (e.g., the identical set of photographs might be generated for various aesthetics, audiences, or simulations).
- For the sake of simplicity and exploration, the prompts are deliberately easy. In a manufacturing atmosphere, they may have a hard and fast construction with a scientific set of parameters.
- We described scenes as if in a photograph studio. Nearly another possible inventive type is feasible (photorealistic, summary, 2D…).
- Our property might be made self-sufficient by saving prompts and ancestors within the picture metadata (e.g., in PNG chunks), permitting for full native storage and retrieval (no database wanted and no extra misplaced prompts!). For particulars, see the “asset metadata” part within the pocket book (hyperlink beneath).
As a bonus, let’s finish with an animated model of our journey, with the technology graph additionally displaying a glimpse of our directions:
display_generation_graph(asset_graph, animated=True)
➕ Extra!
Wish to go deeper?
Thanks for studying. I stay up for seeing what you create!



{kind=link}